Solving Comma.ai's 2017 intern challenge
This approach uses optical flow analysis and Convolutional neural networks to estimate speed of a car from dashcam footage. We are provided with a training video (train.mp4) and the speed data at each frame (train.txt).
- train.mp4: 20 fps video with 20400 frames, each frame is 640(w) x 840(h) x 3 (RGB)
- train.txt: Text file with speed data at each frame
- test.mp4: 20 fps video with 20400 frames, each frame is 640(w) x 840(h) x 3 (RGB)
- os: For manupulating local file system
- cv2: For image processing and optical flow
- numpy: For vector calculations
- pandas: For accessing dataset
- matplotlib: For plotting data and displaying images
- tensorflow: For training neural networks
- keras: For creating neural network architecture
import sys
sys.path.append('/usr/local/lib/python2.7/site-packages')
import os
import cv2
import csv
import random
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import matplotlib.gridspec as gridspec
# from sklearn.model_selection import train_test_split
# from sklearn.utils import shuffle
%matplotlib inlineTo make my life easy, I decided to capture the video frames and save them to .jpg files under data/training_frames instead of directly processing the video. This is computationally less efficient but it makes the processing pipeline much easier. Besides generating images, I also generated a .csv file to corelate the frames with speed data.
I used openCV’s VideoCapture to capture and save the images. These frames could have been cached and processed straight from the video.
def capture_frames(video_source, speed_data):
'''
Captures .mp4 video frames to .jpg images and creates a .csv to store the capture information
'''
num_frames = speed_data.shape[0]
# create VideoCapture instance
cap = cv2.VideoCapture(video_source)
# set frame count
cap.set(cv2.CAP_PROP_FRAME_COUNT, num_frames)
with open('./data/driving.csv', 'w') as csvfile:
fieldnames = ['image_path', 'frame', 'speed']
writer = csv.DictWriter(csvfile, fieldnames = fieldnames)
writer.writeheader()
for idx in xrange(num_frames):
# set frame index
cap.set(cv2.CAP_PROP_POS_FRAMES, idx)
# read the frame
success, image = cap.read()
if success:
image_path = os.path.join('./data/training_frames/', str(idx) + '.jpg')
# save image to IMG folder
cv2.imwrite(image_path, image)
# write row to driving.csv
writer.writerow({'image_path': image_path,
'frame': idx,
'speed': speed_data[idx],
})
else:
print 'Failed to read frame ', idx
print 'Done!'This function was only called once to save the images. Now that we have our images, we can disregard this function and the video, and just work with image data.
#capture_frames('data/train.mp4',np.loadtxt('data/train.txt'))ls datadriving.csv �[34mtest_frames�[m�[m/ train.txt
test.mp4 train.mp4 �[34mtraining_frames�[m�[m/
We have the images and its corresponding speed data, but just training a model with a raw RGB image input and speed value output isn't going to yield the results we are looking for.
Here's why: Having a single image frame alone doesn’t tell us much about the speed. If we think in terms of classical mechanics, you can estimate the position of an object based on a single frame, but to estimate the velocity you need at least two frames because you need a time reference. Velocity is in units: (distance / time). In our case our distance is measured in meters, and our time is measured in seconds. To calculate velocity we need at least two successive frames. To calculate acceleration, which is the change in velocity, we will need ~3 frames, because we will need to calculate how the velocity (2 frames) changes over time (3rd frame). Acceleration is in units (meters / second²).
So knowing that we need at least two frames, it is important to be able to grab pairs of images. Let’s call the current image image_current and the next image image_next for the time being. When we train our network we want to pass in shuffled data, because we don’t want it to learn the video sequence as is, we want it to be able to generalize to any video, and any given sub-sequence.
Double and shuffle: I doubled the dataset, and shuffled by pairs. I need to keep frames together in pairs because that is how I will ultimately determine speed.
df = pd.read_csv('./data/driving.csv')
df.head(10)
len(df)20400
video_fps = 20
times = np.asarray(df['frame'], dtype = np.float32) / video_fps
speeds = np.asarray(df['speed'], dtype=np.float32)
plt.plot(times, speeds, 'r-')
plt.title('Speed vs Time')
plt.xlabel('time (secs)')
plt.ylabel('speed (mph)')
plt.show()
df.tail(5).dataframe thead th {
text-align: left;
}
.dataframe tbody tr th {
vertical-align: top;
}
| image_path | frame | speed | |
|---|---|---|---|
| 20395 | ./data/training_frames/20395.jpg | 20395 | 2.329180 |
| 20396 | ./data/training_frames/20396.jpg | 20396 | 2.289795 |
| 20397 | ./data/training_frames/20397.jpg | 20397 | 2.292917 |
| 20398 | ./data/training_frames/20398.jpg | 20398 | 2.260600 |
| 20399 | ./data/training_frames/20399.jpg | 20399 | 2.206759 |
def batch_shuffle(dframe):
"""
Randomly shuffle pairs of rows in the dataframe, separates train and validation data
generates a uniform random variable 0->9, gives 20% chance to append to valid data, otherwise train_data
return tuple (train_data, valid_data) dataframes
"""
randomized_list = np.arange(len(dframe)-1)
np.random.shuffle(randomized_list)
train_data = pd.DataFrame()
valid_data = pd.DataFrame()
test_data = pd.DataFrame()
for i in randomized_list:
idx1 = i
idx2 = i + 1
row1 = dframe.iloc[[idx1]].reset_index()
row2 = dframe.iloc[[idx2]].reset_index()
randInt = np.random.randint(10)
if 0 <= randInt <= 1:
valid_frames = [valid_data, row1, row2]
valid_data = pd.concat(valid_frames, axis = 0, join = 'outer', ignore_index=False)
if randInt == 2:
test_frames = [test_data, row1, row2]
test_data = pd.concat(test_frames, axis = 0, join = 'outer', ignore_index=False)
if randInt > 2:
train_frames = [train_data, row1, row2]
train_data = pd.concat(train_frames, axis = 0, join = 'outer', ignore_index=False)
return train_data, valid_data, test_data# create training and validation set
train_data, valid_data, test_data = batch_shuffle(df)
# verify data size
print 'Training data size =', train_data.shape
print 'Validation data size =', valid_data.shape
print 'Test data size =', test_data.shapeTraining data size = (28526, 4)
Validation data size = (8230, 4)
Test data size = (4042, 4)
Let's take a look at the raw image data
x = random.sample(xrange(1,len(train_data)), 15)
plt.figure(1, figsize=(20,10))
for i,value in enumerate(x):
img = mpimg.imread(train_data.iloc[value]['image_path'])
plt.subplot(3,5,i+1)
plt.xticks([])
plt.yticks([])
plt.imshow(img)
The video has a mixture of light and dark scenarios. Sometimes roads can have shadows on them while sometimes they are well lit. To make the model more robust, I added brightness augmentation in my pre-processing pipeline. This will randomly change the brightness of the images during training.
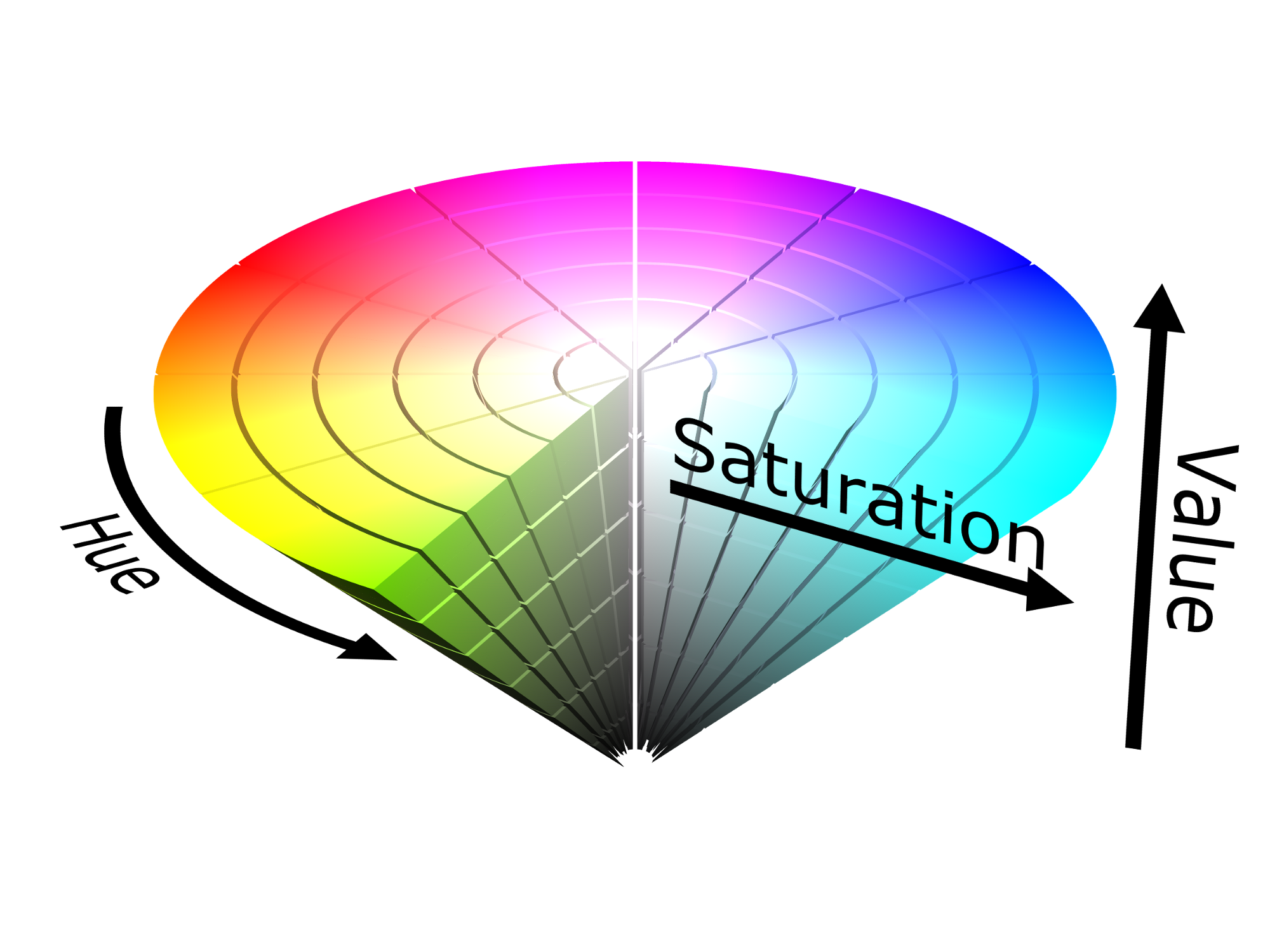
def change_brightness(image, bright_factor):
"""
Augments the brightness of the image by multiplying the saturation by a uniform random variable
Input: image (RGB)
returns: image with brightness augmentation
"""
hsv_image = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
# perform brightness augmentation only on the second channel
hsv_image[:,:,2] = hsv_image[:,:,2] * bright_factor
# change back to RGB
image_rgb = cv2.cvtColor(hsv_image, cv2.COLOR_HSV2RGB)
return image_rgbWe want a metric that captures the information between two successive image frame such that it strongly coorelates with the speed data. There are many different ways to define this metric. I started experimenting with the data to find something distinguishable.
These are all the metrics that weren't successful. Mean Square Error(MSE) was always over 15 with these methods.
I converted them all to RGB before feeding them into the network.
- RGB Difference (image_current_RGB - image_next_RGB)
- HSV Difference (image_current_HSV - image_next_HSV)
- Saturation difference (image_current_sat — image_next_sat)
- Inverted Saturation difference (image_next_sat — image_current_sat)
- Hue difference (image_current_hue — image_next_hue)
img1 = mpimg.imread(train_data.iloc[34]['image_path'])
img2 = mpimg.imread(train_data.iloc[23]['image_path'])
rgb_diff = cv2.cvtColor(img1, cv2.COLOR_BGR2RGB) - cv2.cvtColor(img2, cv2.COLOR_BGR2RGB)
hsv_diff = cv2.cvtColor(img1, cv2.COLOR_RGB2HSV) - cv2.cvtColor(img2, cv2.COLOR_RGB2HSV)
sat = cv2.cvtColor(img1, cv2.COLOR_BGR2HSV)[:,:,1] - cv2.cvtColor(img2, cv2.COLOR_BGR2HSV)[:,:,1]
inv_sat = cv2.cvtColor(img2, cv2.COLOR_BGR2HSV)[:,:,1]*-1
hue = cv2.cvtColor(img2, cv2.COLOR_BGR2HSV)[:,:,0]
plt.figure(1, figsize=(20,10))
plt.subplot(2,3,1)
plt.xticks([])
plt.yticks([])
plt.imshow(img2)
plt.subplot(2,3,2)
plt.xticks([])
plt.yticks([])
plt.imshow(inv_sat)
plt.subplot(2,3,3)
plt.xticks([])
plt.yticks([])
plt.imshow(sat)
plt.subplot(2,3,4)
plt.xticks([])
plt.yticks([])
plt.imshow(hue)
plt.subplot(2,3,5)
plt.xticks([])
plt.yticks([])
plt.imshow(rgb_diff)
plt.subplot(2,3,6)
plt.xticks([])
plt.yticks([])
plt.imshow(hsv_diff)<matplotlib.image.AxesImage at 0x11f171310>

I bumped across optical flow while researching and decided to give it a shot. This is Optical flow's definition from Wikipedia - "Optical flow or optic flow is the pattern of apparent motion of objects, surfaces, and edges in a visual scene caused by the relative motion between an observer and a scene." It is clear why this gave promising result. It measures motion of objects in a visual scene!
I used The Farneback method to calculate the dense optical flow. It means that it computes the optical flow from each pixel point in the current image to each pixel point in the next image.
I trained the model with a few different strategies and got the best result with the last one in the list
- Get optical flow, then convert HSV to RGB
- Get optical flow, convert HSV to RGB, then overlay it ontop of original image
- Get optical flow parameters (ang, magnitude) and expand dimensions of original image to H x W x R x G x B x Ang x Magnitude
- Send in the flow differences as RGB (best result)
def opticalFlowDense(image_current, image_next):
"""
input: image_current, image_next (RGB images)
calculates optical flow magnitude and angle and places it into HSV image
* Set the saturation to the saturation value of image_next
* Set the hue to the angles returned from computing the flow params
* set the value to the magnitude returned from computing the flow params
* Convert from HSV to RGB and return RGB image with same size as original image
"""
gray_current = cv2.cvtColor(image_current, cv2.COLOR_RGB2GRAY)
gray_next = cv2.cvtColor(image_next, cv2.COLOR_RGB2GRAY)
hsv = np.zeros(image_current.shape)
# set saturation
hsv[:,:,1] = cv2.cvtColor(image_next, cv2.COLOR_RGB2HSV)[:,:,1]
# Flow Parameters
flow_mat = None
image_scale = 0.5
nb_images = 1
win_size = 15
nb_iterations = 2
deg_expansion = 5
STD = 1.3
extra = 0
# obtain dense optical flow paramters
flow = cv2.calcOpticalFlowFarneback(gray_current, gray_next,
flow_mat,
image_scale,
nb_images,
win_size,
nb_iterations,
deg_expansion,
STD,
0)
# convert from cartesian to polar
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
# hue corresponds to direction
hsv[:,:,0] = ang * (180/ np.pi / 2)
# value corresponds to magnitude
hsv[:,:,2] = cv2.normalize(mag,None,0,255,cv2.NORM_MINMAX)
# convert HSV to float32's
hsv = np.asarray(hsv, dtype= np.float32)
rgb_flow = cv2.cvtColor(hsv,cv2.COLOR_HSV2RGB)
return rgb_flowExplanation: I simply computed the optical flow and then grabbed the magnitudes and angles of the flow. I created a data object to store my results. data grabbed the grayscale version of image_next and set that to its saturation value. data then saved the angles to its hue value and the magnitude’s to its value value. HSV stands for hue, saturation, value. I then send rgb_flow into my network.
Notice how hue should go from 0-> 360 and magnitude from (0 -> 255).
img1 = mpimg.imread(train_data.iloc[0]['image_path'])
img2 = mpimg.imread(train_data.iloc[1]['image_path'])
rgb_diff = opticalFlowDense(img1,img2)
plt.xticks([])
plt.yticks([])
plt.imshow(rgb_diff)<matplotlib.image.AxesImage at 0x11ed3b1d0>

It’s a good idea to crop out unnecessary information from the image, stuff like the hood of the car and sky can go. I resized the image to (66, 220) for my network because that’s what my neural network architecture expects.
I also created a few nice functions to help me process each image, so I can work with the image paths directly from the generator.
def crop_image(image, scale):
"""
preprocesses the image
input: image (480 (y), 640 (x), 3) RGB
output: image (shape is (66, 220, 3) as RGB)
This stuff is performed on my validation data and my training data
Process:
1) Cropping out black spots
3) resize to (66, 220, 3) if not done so already from perspective transform
"""
# Crop out sky (top 130px) and the hood of the car (bottom 270px)
image_cropped = image[130:370,:] # -> (240, 640, 3)
height = int(240*scale)
width = int(640*scale)
image = cv2.resize(image_cropped, (220, 66), interpolation = cv2.INTER_AREA)
return imageFor validation data:
def preprocess_image_valid_from_path(image_path, scale_factor=0.5):
img = cv2.imread(image_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = crop_image(img, scale_factor)
return imgFor training data:
def preprocess_image_from_path(image_path, scale_factor=0.5, bright_factor=1):
img = cv2.imread(image_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = change_brightness(img, bright_factor)
img = crop_image(img, scale_factor)
return imgimg = preprocess_image_from_path(train_data.iloc[404]['image_path'])
img_next = preprocess_image_from_path(train_data.iloc[405]['image_path'])
plt.figure()
plt.imshow(img)
plt.figure()
plt.imshow(img_next)<matplotlib.image.AxesImage at 0x11f554f10>


rgb_flow = opticalFlowDense(img,img_next)
plt.figure()
plt.imshow(rgb_flow)<matplotlib.image.AxesImage at 0x1239c9490>

It is very efficient to use generators to actually process the images because most machines do not have enough memory to hold all the images when batching.
Generators
- This is used to yield train batches of rgb_flow and average speed.
- Since the data is already shuffled, we can segment the data as it is and yield
- Generators allow me to not clog my memory stack so I can perform these operations.
def generate_training_data(data, batch_size = 16, scale_factor = 0.5):
# sample an image from the data to compute image size
img = preprocess_image_from_path(train_data.iloc[1]['image_path'],scale_factor)
# create empty batches
image_batch = np.zeros((batch_size, img.shape[0], img.shape[1], img.shape[2]))
label_batch = np.zeros(batch_size)
i=0
while True:
speed1 = data.iloc[i]['speed']
speed2 = data.iloc[i+1]['speed']
bright_factor = 0.2 + np.random.uniform()
img1 = preprocess_image_from_path(data.iloc[i]['image_path'],scale_factor,bright_factor)
img2 = preprocess_image_from_path(data.iloc[i+1]['image_path'],scale_factor,bright_factor)
rgb_flow_diff = opticalFlowDense(img1, img2)
avg_speed = np.mean([speed1,speed2])
image_batch[(i/2)%batch_size] = rgb_flow_diff
label_batch[(i/2)%batch_size] = avg_speed
if not(((i/2)+1)%batch_size):
yield image_batch, label_batch
i+=2
i=i%data.shape[0]def generate_validation_data(data, batch_size = 16, scale_factor = 0.5):
i=0
while i < len(data):
speed1 = data.iloc[i]['speed']
speed2 = data.iloc[i+1]['speed']
img1 = preprocess_image_from_path(data.iloc[i]['image_path'],scale_factor)
img2 = preprocess_image_from_path(data.iloc[i+1]['image_path'],scale_factor)
rgb_diff = opticalFlowDense(img1, img2)
rgb_diff = rgb_diff.reshape(1, rgb_diff.shape[0], rgb_diff.shape[1], rgb_diff.shape[2])
avg_speed = np.array([[np.mean([speed1,speed2])]])
yield rgb_diff, avg_speedI used an end to end learning architecture based on Nvidia’s paper. Let’s pretend the input was (480, 640, 3) for this case.
For classification we typically use a softmax at the end of our network so we can convert from scores to probabilities. For regression simply leave out the softmax and output the result of the last fully connected layer (perceptron).
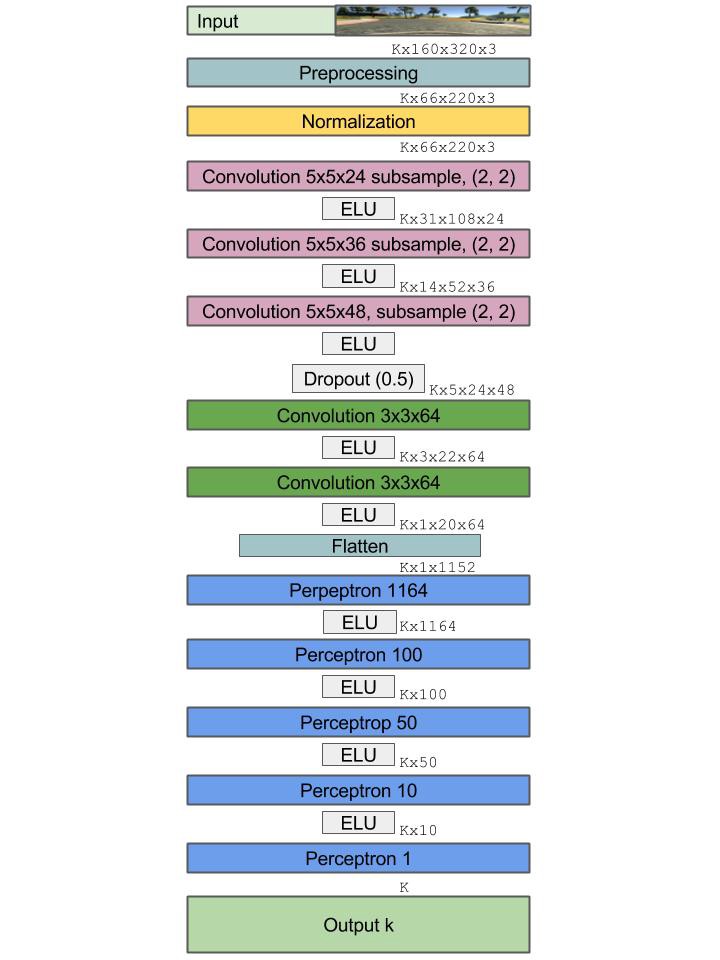
I added extra filters to try to capture more data. Architecture changed as a result of added dimensions.
from keras.models import Sequential
from keras.layers.convolutional import Convolution2D
from keras.layers.pooling import MaxPooling2D
from keras.layers.core import Activation, Dropout, Flatten, Dense, Lambda
from keras.layers import ELU
from keras.optimizers import Adam
import keras.backend.tensorflow_backend as KTF
N_img_height = 66
N_img_width = 220
N_img_channels = 3
def nvidia_model():
inputShape = (N_img_height, N_img_width, N_img_channels)
model = Sequential()
# normalization
# perform custom normalization before lambda layer in network
model.add(Lambda(lambda x: x/ 127.5 - 1, input_shape = inputShape))
model.add(Convolution2D(24, (5, 5),
strides=(2,2),
padding = 'valid',
kernel_initializer = 'he_normal',
name = 'conv1'))
model.add(ELU())
model.add(Convolution2D(36, (5, 5),
strides=(2,2),
padding = 'valid',
kernel_initializer = 'he_normal',
name = 'conv2'))
model.add(ELU())
model.add(Convolution2D(48, (5, 5),
strides=(2,2),
padding = 'valid',
kernel_initializer = 'he_normal',
name = 'conv3'))
model.add(ELU())
model.add(Dropout(0.5))
model.add(Convolution2D(64, (3, 3),
strides = (1,1),
padding = 'valid',
kernel_initializer = 'he_normal',
name = 'conv4'))
model.add(ELU())
model.add(Convolution2D(64, (3, 3),
strides= (1,1),
padding = 'valid',
kernel_initializer = 'he_normal',
name = 'conv5'))
model.add(Flatten(name = 'flatten'))
model.add(ELU())
model.add(Dense(100, kernel_initializer = 'he_normal', name = 'fc1'))
model.add(ELU())
model.add(Dense(50, kernel_initializer = 'he_normal', name = 'fc2'))
model.add(ELU())
model.add(Dense(10, kernel_initializer = 'he_normal', name = 'fc3'))
model.add(ELU())
# do not put activation at the end because we want to exact output, not a class identifier
model.add(Dense(1, name = 'output', kernel_initializer = 'he_normal'))
adam = Adam(lr=1e-4, beta_1=0.9, beta_2=0.999, epsilon=1e-08, decay=0.0)
model.compile(optimizer = adam, loss = 'mse')
return modelUsing TensorFlow backend.
Input dense optical flow between two image frames
Optimizer: Adam
loss: MSE
epoch: 25
Samples per epoch: 400
Batches per sample 32 images, 16 optical flow rgb_diffs
I trained the model several times, all with difference MSE values. When I trained the model by passing in simple RGB image differences as my discernible metric I received rather poor results. My Mean Square Error was ~20. When I used dense optical flow as the discernible metric my loss looks like this: On 25 epochs, the final MSE was 3.4.
Remember, after we train the model I want to use the weights to perform linear regression: where I will simply take my weight matrix and multiply it with the input to predict the speed. This is not a classification task.
Define Training Parameters
val_size = len(valid_data.index)
valid_generator = generate_validation_data(valid_data)
BATCH = 16
print 'val_size: ', val_sizeval_size: 8230
from keras.callbacks import EarlyStopping, ModelCheckpoint
filepath = 'model-weights-Vtest3.h5'
# earlyStopping = EarlyStopping(monitor='val_loss',
# patience=1,
# verbose=1,
# min_delta = 0.23,
# mode='min',)
modelCheckpoint = ModelCheckpoint(filepath,
monitor = 'val_loss',
save_best_only = True,
mode = 'min',
verbose = 1,
save_weights_only = True)
callbacks_list = [modelCheckpoint]patience = 1: Allow a 1 epoch tolerance where the validation loss may not decrease by min_delta.
min_delta = 0.4: Only re-save the weights with the next epoch values if the validation loss decreases by 0.4 or more.
verbose = 1: Print the output of the monitor for each epoch to the console.
model = nvidia_model()
train_size = len(train_data.index)
train_generator = generate_training_data(train_data, BATCH)
history = model.fit_generator(
train_generator,
steps_per_epoch = 400,
epochs = 25,
callbacks = callbacks_list,
verbose = 1,
validation_data = valid_generator,
validation_steps = val_size)
print(history)Epoch 1/25
399/400 [============================>.] - ETA: 0s - loss: 62.0301Epoch 00000: val_loss improved from inf to 83.29205, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 333s - loss: 61.9783 - val_loss: 83.2920
Epoch 2/25
399/400 [============================>.] - ETA: 0s - loss: 28.2500Epoch 00001: val_loss improved from 83.29205 to 78.18358, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 323s - loss: 28.2143 - val_loss: 78.1836
Epoch 3/25
399/400 [============================>.] - ETA: 0s - loss: 21.3574Epoch 00002: val_loss improved from 78.18358 to 42.53305, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 325s - loss: 21.3395 - val_loss: 42.5330
Epoch 4/25
399/400 [============================>.] - ETA: 0s - loss: 17.1211Epoch 00003: val_loss improved from 42.53305 to 28.99970, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 324s - loss: 17.1150 - val_loss: 28.9997
Epoch 5/25
399/400 [============================>.] - ETA: 0s - loss: 15.0338Epoch 00004: val_loss did not improve
400/400 [==============================] - 330s - loss: 15.0295 - val_loss: 30.2761
Epoch 6/25
399/400 [============================>.] - ETA: 0s - loss: 13.5555Epoch 00005: val_loss improved from 28.99970 to 25.72088, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 331s - loss: 13.5352 - val_loss: 25.7209
Epoch 7/25
399/400 [============================>.] - ETA: 0s - loss: 11.9705Epoch 00006: val_loss improved from 25.72088 to 9.30693, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 325s - loss: 11.9692 - val_loss: 9.3069
Epoch 8/25
399/400 [============================>.] - ETA: 0s - loss: 10.8806Epoch 00007: val_loss improved from 9.30693 to 1.45191, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 334s - loss: 10.8761 - val_loss: 1.4519
Epoch 9/25
399/400 [============================>.] - ETA: 0s - loss: 10.2335Epoch 00008: val_loss did not improve
400/400 [==============================] - 330s - loss: 10.2443 - val_loss: 9.6630
Epoch 10/25
399/400 [============================>.] - ETA: 0s - loss: 9.3531Epoch 00009: val_loss did not improve
400/400 [==============================] - 327s - loss: 9.3623 - val_loss: 5.8259
Epoch 11/25
399/400 [============================>.] - ETA: 0s - loss: 9.2549Epoch 00010: val_loss did not improve
400/400 [==============================] - 328s - loss: 9.2481 - val_loss: 1.7415
Epoch 12/25
399/400 [============================>.] - ETA: 0s - loss: 8.1405Epoch 00011: val_loss did not improve
400/400 [==============================] - 334s - loss: 8.1317 - val_loss: 1.7217
Epoch 13/25
399/400 [============================>.] - ETA: 0s - loss: 7.4870Epoch 00012: val_loss did not improve
400/400 [==============================] - 320s - loss: 7.4949 - val_loss: 1.4733
Epoch 14/25
399/400 [============================>.] - ETA: 0s - loss: 7.1477Epoch 00013: val_loss improved from 1.45191 to 0.76531, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 320s - loss: 7.1429 - val_loss: 0.7653
Epoch 15/25
399/400 [============================>.] - ETA: 0s - loss: 6.8385Epoch 00014: val_loss did not improve
400/400 [==============================] - 395s - loss: 6.8526 - val_loss: 1.3904
Epoch 16/25
399/400 [============================>.] - ETA: 0s - loss: 6.3542Epoch 00015: val_loss did not improve
400/400 [==============================] - 329s - loss: 6.3455 - val_loss: 0.9741
Epoch 17/25
399/400 [============================>.] - ETA: 0s - loss: 5.6731Epoch 00016: val_loss improved from 0.76531 to 0.25148, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 329s - loss: 5.6727 - val_loss: 0.2515
Epoch 18/25
399/400 [============================>.] - ETA: 0s - loss: 5.3833Epoch 00017: val_loss did not improve
400/400 [==============================] - 322s - loss: 5.3764 - val_loss: 0.9699
Epoch 19/25
399/400 [============================>.] - ETA: 0s - loss: 5.1946Epoch 00018: val_loss did not improve
400/400 [==============================] - 314s - loss: 5.1934 - val_loss: 4.6893
Epoch 20/25
399/400 [============================>.] - ETA: 0s - loss: 4.9424Epoch 00019: val_loss did not improve
400/400 [==============================] - 316s - loss: 4.9360 - val_loss: 0.4666
Epoch 21/25
399/400 [============================>.] - ETA: 0s - loss: 4.4735Epoch 00020: val_loss improved from 0.25148 to 0.20090, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 316s - loss: 4.4726 - val_loss: 0.2009
Epoch 22/25
399/400 [============================>.] - ETA: 0s - loss: 4.3277Epoch 00021: val_loss improved from 0.20090 to 0.01897, saving model to model-weights-Vtest3.h5
400/400 [==============================] - 316s - loss: 4.3255 - val_loss: 0.0190
Epoch 23/25
399/400 [============================>.] - ETA: 0s - loss: 4.1106Epoch 00022: val_loss did not improve
400/400 [==============================] - 401s - loss: 4.1088 - val_loss: 0.4995
Epoch 24/25
399/400 [============================>.] - ETA: 0s - loss: 3.7082Epoch 00023: val_loss did not improve
400/400 [==============================] - 315s - loss: 3.7066 - val_loss: 3.0255
Epoch 25/25
399/400 [============================>.] - ETA: 27s - loss: 3.4725Epoch 00024: val_loss did not improve
400/400 [==============================] - 25768s - loss: 3.4793 - val_loss: 1.3989
<keras.callbacks.History object at 0x1329fa950>
print(history.history.keys())
### plot the training and validation loss for each epoch
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('Model-v2test mean squared error loss 25 epochs')
plt.ylabel('mean squared error loss')
plt.xlabel('epoch')
plt.legend(['training set', 'validation set'], loc='upper right')
# plt.show()
plt.savefig('loss_over_training.png')['loss', 'val_loss']


This gif is speed up 3X. Checkout the full video here
I got a Mean Square Error(MSE) of 3.48 on the training set, an MSE of 1.4 on the validation data, and an MSE of 3.5 on the test set. Even though the validation curve has some noise, the overall trend suggests that we are not overfitting the training set.
This was a iterative process like all Deep Learning projects are. This is a list of things I tuned / experimented with:
- Inputs: rgb difference, hsv difference, sparse optical flow, dense optical flow
- Hyperparameters: epoch, batch_size, steps_per_epoch
- Optimizers: batch gradient descent, rms prop, momentum, adam optimizer
- Optical flow is a powerful tool to measure motion of objects in images.
- Adam Optimizer converges faster because it uses momentum and RMS prop to modify the gradient during descent
- Python generators can be used to yield batches of data. They are very efficient for image processing because most machines do not have enough memory to hold all the images when batching.
- OpenCV is great for video and image processing.
- Training on local machine is horrible for training algorithms. Always use cloud services. This also allows you to train multiple models in parallel. (Mo money you spend, mo problems you solve)